|

 Mother Goose and the Goslings venture into a Martian Cave for a look-see. Image by R.D. "Gus" Frederick |
But how to explore them? One unique approach recently proposed employs specialized swarms of insect-like mini-robots accompanying one or more flexible rover/relay station robots. Utilizing a robotic fractal approach that starts with a wide view of a promising area, then zooms in to reveal detail at a series of smaller scales, the approach mimics the actions of a scientist in the field.
One such proposal, the "Mother Goose Mission" was presented to NASA/JPL as part of the Mars Scout mission, planned for the 2006/7 launch window. Mother Goose makes use of a robotically piloted glider that searches for a suitable location from the air, then lands to release the pilot; a six-legged walking robot named Mother Goose. Mother's onboard sensors provide details to supplement the glider's eye view at a smaller scale. For a closer view of small hard to access locations, like a cave entrance or shielded crevasses, Mother releases her "goslings" to explore at an even smaller level. The baby bug-bot goslings return to mother to upload data and recharge their batteries. The multiple redundancy allows for the loss of one or more individuals without dramatically jeopardizing the mission.
 Joe Berger and the 5 foot radio-controlled scale model of the Mother Goose glider. |
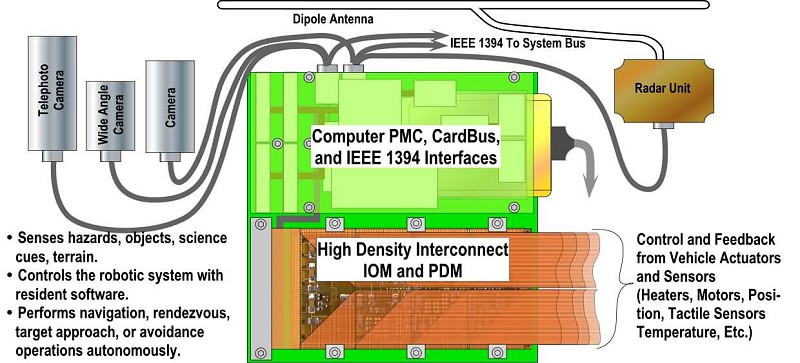
The glider control surfaces are controlled by the autonomous computer/software system called LEIF (Landing Enabled by Intelligent Functions). LEIF is actually located in the roving robot that acts as the pilot for the glider. The LEIF has built into it a communications system for linking to one or more of the Mars telecom relay equipped orbiters described in the Request for Mars Scout concepts. During the glide which would last several hours, LEIF will, select a landing spot based on a combination of criteria that include hazard avoidance, complex structures nearby, and interesting TES and radar data. The selection methodology will be included as part of the LEIF autonomous control software. The light weight of the glider will allow a very low velocity landing at a selected spot.
{kind=link}
Once landed, the LEIF driven Roving Robot will separate itself from the lifting wing and start proceeding to a location finally selected by LEIF from the last aerial approach. As it proceeds toward that location, LEIF, informed by the last aerial data plus new data from the stereo imager, and PIFTS will use its hazard avoidance to dodge rocks, precipices, and walls as it heads toward what appears like a good place to do the close up looks.
Return to the Martian Caves Index
Copyright © 2002-04 - Complex Systems Research; Inc.