Mars Exploration Rovers - About the MER PanCam From Cornell University's "Mission to Mars" Web Site The Caves of Mars | Education Resources | MER Color Index | ||||||||
| PanCam uses 1024 ×2048 pixel Mitel CCD array detectors developed for the MER Project. The arrays are operated in frame transfer mode, with one 1024 ×1024-pixel region constituting the active imaging area and the another adjacent 1024 ×1024 region serving as a frame transfer buffer. The frame transfer buffer has an opaque cover that prevents >99%of light at all wavelengths from 400 to 1100 nm from being detected by this region of the CCD. The pixels are continuous, and the pitch is 12 µm in both directions. The arrays are capable of exposure times from 0 msec (to characterize the “readout smear ”signal acquired during the ~5 msec required to transfer the image to the frame transfer buffer) to 30 sec. Under expected operating conditions, the arrays have at least 150, 000 electrons of full-well depth, and a read noise of less than 50 electrons. Dark current varies with temperature;it is negligible at -55 °C and is <1200 electrons/sec at 0 °C. Analog to digital converters provide a digital output with 12-bit encoding, and SNR >200 at all signal levels above 20% of full scale. The detector response has a linearity >99% for signals between 10% to 90% of full well. Each array is combined with optics and a small filter wheel to form one ineyele of a multispectral, stereoscopic imaging system. The optics for both cameras consist of identical 3-element symmetrical lenses with an effective focal length of 38 mm and a focal ratio of f/20, yielding an IFOV of 0. 28 mrad/pixel and a square FOV of 16. 8°16. 8° per eye. The optics and filters are protected from direct exposure to the martian environment by a sapphire window at the front of the optics barrel. The optical design provides for more than 90% of the encircled energy to be contained in an area equal to 33 IFOVs, and 99% in an area equal to 55 IFOVs, across the entire range of spectral responsivity of the instrument and over the required operating temperature range for performance of PanCam within specifications (-55°C to 0°C). The optical design allows PanCam to maintain optimal focus from infinity to within about 1.5 meters of the cameras. At ranges closer than 1.5 meters, PanCam images suffer from some defocus blur. For example, at a range of 80 cm (the approximate distance from the PanCam calibration target), the defocus blur is about 10 pixels.
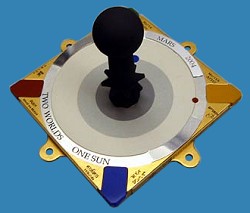
 Each filter wheel has eight positions, allowing multispectral sky imaging and surface mineralogic studies in the 400-1100 nm wavelength region (right). The left wheel contains one inclearlt (empty) position. The remaining filter wheel positions are filled with narrowband interference filters that are circular and 10 mm in diameter, and that have the central wavelengths and bandpasses listed in Table 2. 1. 2-1, (left). One filter on each eye has a Neutral Density 5.0 coating to allow direct imaging of the Sun at two wavelengths. Each filter wheel has eight positions, allowing multispectral sky imaging and surface mineralogic studies in the 400-1100 nm wavelength region (right). The left wheel contains one inclearlt (empty) position. The remaining filter wheel positions are filled with narrowband interference filters that are circular and 10 mm in diameter, and that have the central wavelengths and bandpasses listed in Table 2. 1. 2-1, (left). One filter on each eye has a Neutral Density 5.0 coating to allow direct imaging of the Sun at two wavelengths.Radiometric calibration of both PanCam cameras will be performed with an absolute accuracy of 7% or better and a relative precision (pixel-to-pixel) of 1% or better. Calibration will be achieved using a combination of preflight calibration data and inflight images of a PanCam calibration target carried by the rover. The PanCam calibration target is placed within unobstructed view of both camera heads and will be fully illuminated by the Sun between at least 10:00 AM and 2:00 PM local solar time for nominal rover orientations. The target has three gray regions of variable reflectivity (approximately 20%, 40%, and 60%) and four colored regions (peak reflectance in the blue, green, red, and near-IR) for colorimetric calibration. It includes a vertical post that will cast a shadow simultaneously across all three gray surfaces at some time within the 10:00 AM to 2:00 PM nominal operating range. The calibration target is large enough that defocus blur will not produce significant degradation of the calibration images. The two PanCam eyes are mounted on a mast on the rover deck. The mast is referred to as the PanCam Mast Assembly (PMA), and also includes several key components for the Mini-TES. The PMA is erected to the vertical position by a deployment actuator at its base. The cameras are located on a "camera bar ”with a boresight 180 ° from the Mini-TES boresight. The rover navigation cameras (Navcams) are also located on this same camera bar, and point in the same direction as PanCam. The boresight of the PanCam cameras is approximately 1.3 m above the martian surface with the PMA in the deployed position. The cameras are moved together by ±90 °in elevation using a geared brush motor on the camera bar. The entire PMA head, including the cameras, can be rotated 360 °in azimuth by a geared brush motor assembly. A separate geared brush motor provides elevation actuation for the Mini-TES elevation mirror assembly. Hard stops are provided for all actuation axes. The two PanCam eyes are separated by 30 cm horizontally and have a 1° toe-in. This separation and toe-in provide an adequate convergence distance for scientifically useful stereo topographic and ranging solutions to be obtained from the near-field (5-10 m) to approximately 100 m from the rover. Pointing control is <2° in azimuth and <1° in elevation. Pointing knowledge relative to the hardstops is 0. 1° over the entire range of motion of PanCam. PanCam will operate primarily during the daytime to obtain high-quality measurements of sunlight reflected off rock and soil surfaces and airborne dust particles, as well as direct solar images using the two ND filters. Twilight or nighttime sky or astronomical object imaging may be possible but has not been committed to by the Project. The required operating temperature range for performance of PanCam within specifications is -55°C to 0°C. PanCam will be commanded by and will return digital data directly to the rover computer. The computer provides the capability to perform a limited set of image processing tasks on PanCam data prior to transmission. These tasks include:
Return to the MER Color Index | ||||||||
| The Caves of Mars Project is funded by a NIAC Phase II Grant from the NASA Institute for Advanced Concepts. Copyright © 2002-04 - Complex Systems Research; Inc. | ||||||||